ANYmal energy test
In this test, we disabled contact, joint limit, damping, and actuation to observe energy preservability of the articulated system simulation on the physics engines.
The test focuses on:
- Energy preservability
Test scenario
A 18 DOF quadruped robot ANYmal is lifted up to the air and free dropped. The system energy was measured during the drop.
Tested solver list
- Rai
- Bisection solver (Rai solver)
- Bullet
- Sequential Impulse
- ODE
- Dantzig
- LCP PGS
- MuJoCo
- PGS solver
- CG solver
- Newton solver
- Dart
- Dantzig
- LCP PGS
Results
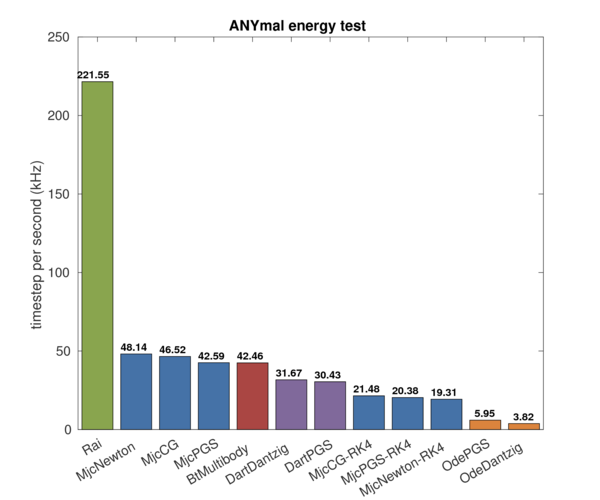
The results of the test are as following figures.
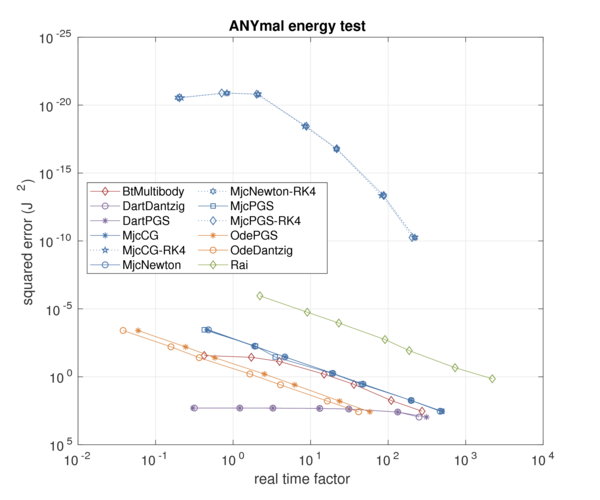
Since the discontinuity of the simulation gone, Runge-Kutta 4th order(RK4) integration has a huge benefit on the accuracy of the simulation. Apparently, the accuracy of the MuJoCo's RK4 integration is not comparable to Euler integration as the speed-accuracy curve describes.
Notably, RaiSim's mid-point Euler integration scheme shows the best energy preservability among Euler engines. In terms of speed, it is approximately 5~7 times faster than MuJoCo Euler, Bullet and Dart and 10 times faster than MuJoCo RK4.