Real-time path planning in outdoor environments
still challenges modern robotic systems due to differences in
terrain traversability, diverse obstacles, and the necessity for
fast decision-making. Established approaches have primarily
focused on geometric navigation solutions, which work well for
structured geometric obstacles but have limitations regarding
the semantic interpretation of different terrain types and their
affordances. Moreover, these methods fail to identify traversable
geometric occurrences, such as stairs.
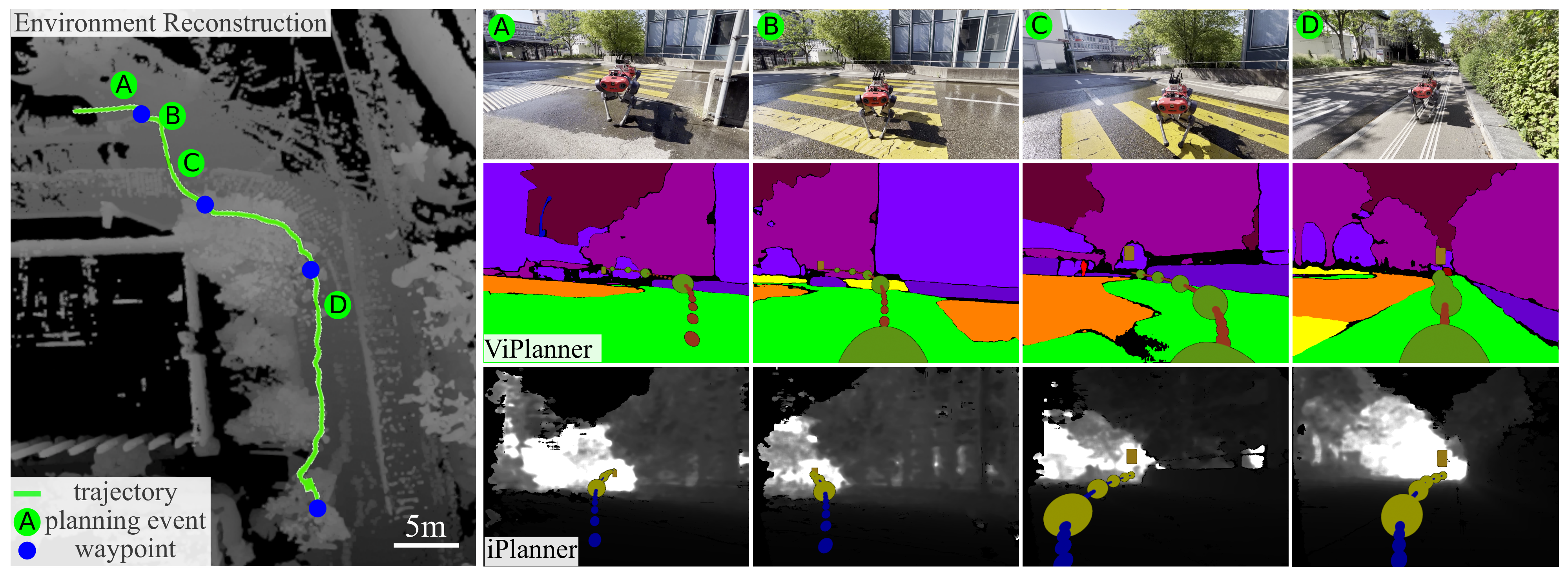
To overcome these issues, we introduce ViPlanner, a learned local path planning approach
that generates local plans based on geometric and semantic
information. The system is trained using the Imperative Learning
paradigm, for which the network weights are optimized endto-end based on the planning task objective. This optimization
uses a differentiable formulation of a semantic costmap, which
enables the planner to distinguish between the traversability
of different terrains and accurately identify obstacles. The
semantic information is represented in 30 classes using an
RGB colorspace that can effectively encode the multiple levels
of traversability. We show that the planner can adapt to
diverse real-world environments without requiring any realworld training. In fact, the planner is trained purely in
simulation, enabling a highly scalable training data generation.
Experimental results demonstrate resistance to noise, zeroshot sim-to-real transfer, and a decrease of 38.02% in terms
of traversability cost compared to purely geometric-based
approaches.